Perro robot aprende a caminar en una hora y lo comparan con pequeño potrillo
Los animales tardan aproximadamente un mes en aprender a caminar para evitar a sus predadores, pero un equipo de científicos construyeron un perro robot, llamado Morti, que logró caminar en una hora.
Investigadores del Instituto Max Planck para Sistemas Inteligentes (MPI-IS) en Stuttgart, Alemania, realizaron un estudio de investigación para descubrir cómo los animales aprenden a caminar y aprender de los tropiezos ayudándose de un perro robot.
¿En qué se enfocaron los investigadores al crear el perro robot?
Los animales nacen con redes de coordinación muscular ubicadas en la médula espinal. Sin embargo, aprender la coordinación precisa de los músculos y tendones de las piernas lleva algún tiempo. Inicialmente, los animales bebés, como un potrillo, dependen en gran medida de los reflejos de la médula espinal.

Aunque algo más básico, los reflejos de control motor ayudan al animal a evitar caerse y lastimarse durante sus primeros intentos de caminar. Se debe practicar el siguiente control muscular más avanzado y preciso, hasta que finalmente el sistema nervioso se adapte bien a los músculos y tendones de las patas del animal joven. No más tropiezos descontrolados: el animal joven ahora puede seguir el ritmo de los adultos, de acuerdo con el Instituto Max Planck.
“Como ingenieros y especialistas en robótica, buscamos la respuesta construyendo un robot que presenta reflejos como un animal y aprende de los errores”, dice Felix Ruppert, ex estudiante de doctorado en el grupo de investigación de Locomoción Dinámica en MPI-IS.
“Si un animal tropieza, ¿es un error? No si sucede una vez. Pero si tropieza con frecuencia, nos da una medida de qué tan bien camina el robot”, aseguró Ruppert.
Algoritmo de aprendizaje
Después de aprender a caminar en sólo una hora, el robot de Ruppert hace un buen uso de la compleja mecánica de sus piernas.
Un algoritmo de optimización bayesiano guía el aprendizaje: la información medida del sensor del pie se compara con los datos objetivo de la médula espinal virtual modelada que se ejecuta como un programa en la computadora del robot.
El robot aprende a caminar comparando continuamente la información del sensor enviada y esperada, ejecutando bucles reflejos y adaptando sus patrones de control motor.
El algoritmo de aprendizaje adapta los parámetros de control de un Generador Central de Patrones (CPG). En humanos y animales, estos generadores de patrones centrales son redes de neuronas en la médula espinal que producen contracciones musculares periódicas sin la intervención del cerebro.
Las redes generadoras de patrones centrales ayudan a generar tareas rítmicas como caminar, parpadear o hacer la digestión. Además, los reflejos son acciones de control motor involuntario desencadenadas por vías neuronales codificadas que conectan sensores en la pierna con la médula espinal.
En el animal recién nacido, las GPC inicialmente aún no están lo suficientemente ajustadas y el animal tropieza, tanto en terrenos llanos como irregulares. Pero el animal aprende rápidamente cómo sus CPG y sus reflejos controlan los músculos y los tendones de las piernas.
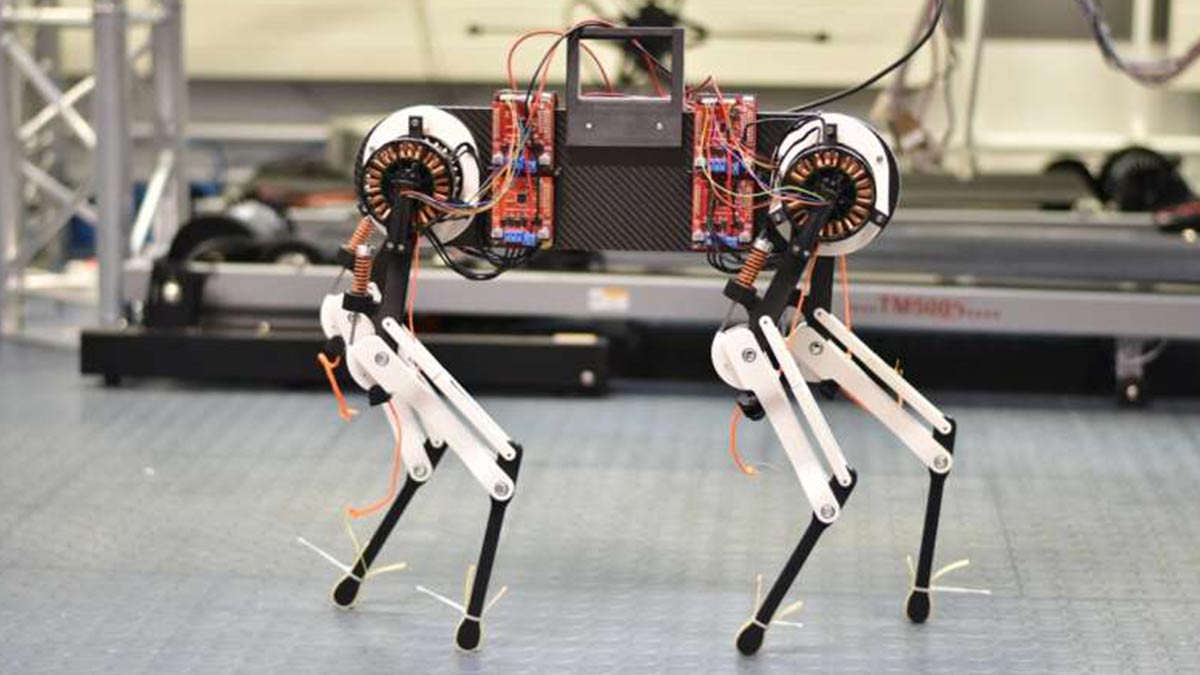
Así funciona Morti, el perro robot
El CPG de Morti se simula en una computadora pequeña y liviana que controla el movimiento de las piernas del robot.
Esta médula espinal virtual se coloca en la espalda del robot cuadrúpedo donde estaría la cabeza. Durante la hora que tarda el robot en caminar sin problemas, los datos de los sensores de los pies del robot se comparan continuamente con la toma de contacto prevista por el CPG del robot.
Si el robot tropieza, el algoritmo de aprendizaje cambia qué tan lejos se balancean las piernas hacia adelante y hacia atrás, qué tan rápido se balancean las piernas y cuánto tiempo está una pierna en el suelo. El movimiento ajustado también afecta qué tan bien el robot puede utilizar su mecánica de piernas compatible.
Durante el proceso de aprendizaje, el CPG envía señales motrices adaptadas para que el robot tropiece en adelante menos y optimice su marcha. En este marco, la médula espinal virtual no tiene conocimiento explícito sobre el diseño de las piernas del robot, sus motores y resortes. Sin saber nada sobre la física de la máquina, carece de un “modelo” de robot.
“Nuestro robot prácticamente ‘nace’ sin saber nada sobre la anatomía de sus piernas o cómo funcionan”, explica Ruppert.
